Sensors data
Data from sensors are sent in the following TLV structure:
type | length [B] | value |
|---|---|---|
0x0005 | up to 23 | active_sensors (1B), sensors_data (up to 22B) |
This structure has different lengths. The length of it depends on activated sensors that want to send their data. Information about which sensors are active is encoded in the first byte of the structure.
The active sensors byte is encoded in the following way.
bit | sensor | Description |
|---|---|---|
7 | pushbutton | It is set to 1 in one blink after the pushbutton was pressed. No added payload. |
6 | reserved | |
5 | reserved | |
4 | reserved | |
3 | barometer | It is set to 1 if the barometer is active. If active the 4 bytes of sensors data are added to the payload. Order of data: raw_temperature (1B), raw_pressure (3B)* |
2 | magnetometer | It is set to 1 if the magnetometer is active. If active the 6 bytes of sensors data are added to the payload. Order of the data: x_axis (2B)*, y_axis (2B)*, z_axis (2B)* |
1 | gyroscope | It is set to 1 if the gyroscope is active. If active the 6 bytes of sensors data are added to the payload. Order of the data: x_axis (2B)*, y_axis (2B)*, z_axis (2B)* |
0 | accelerometer | It is set to 1 if the accelerometer is active. If active the 6 bytes of sensors data are added to the payload. Order of the data: x_axis (2B)*, y_axis (2B)*, z_axis (2B)* |
*all multibyte values are in little-endian order
If more than one sensors are active, the sensors data are ordered in the following order → Barometer (temperature, pressure), Magnetometer, Gyroscope, Accelerometer.
All sensors data are sent in the raw form - the following formulas must be used to get in base units:
Temperature
![]()
Atmospheric pressure
![]()
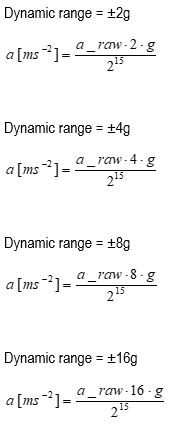
Acceleration
The formula depends on the configurable parameter - dynamic range of the accelerometer which can be found in the infoMsg.
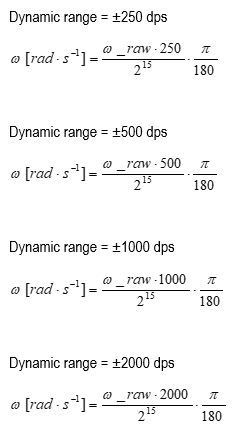
Gyroscope
The formula depends on the configurable parameter - dynamic range of the gyroscope which can be found in the infoMsg.
Magnetometer
![]()