Info Message
This message contains complex information about the tag.
type | length | value |
|---|---|---|
0x000E | 37 | tag_information |
The tag information contains the following fields:
field | description | length | endianity |
|---|---|---|---|
battVoltage | Raw value of battery voltage. See battery level page. | 1B | N/A |
platform | 0 – CR_tag ; 1 – Li-Ion tag | 1B | N/A |
hw_ver | byte_0 – HW_version; byte_1 – HW_revision; | 2B | N/A |
fw_ver | byte_0 – FW_version; byte_1 – FW_subversion; byte_2 - FW_revision | 3B | N/A |
channel | UWB channel number | 1B | N/A |
data_rate | 0 – 110 kbps; 1 – 850 kbps; 2 – 6.8 Mbps | 1B | N/A |
preamble | Preamble length – see Tab. 2 | 1B | N/A |
prf | 0 – 16 MHz ; 1 – 64 MHz | 1B | N/A |
preamCode | Preamble code number | 1B | N/A |
nSfd | Start frame delimiter: 0 –STD; 1 – NON-STD | 1B | N/A |
sleep mode | Sleep mode during no motion. See Tab. 3. | 1B | N/A |
random_dev | Random deviation 0 – disable ; 1 - enable | 1B | N/A |
refresh_interval | Blink refresh interval in milliseconds | 4B | Little-endian |
sm_refresh_interval | Blink refresh interval in milliseconds during sleep (when the tag is not moving) | 4B | Little-endian |
TX_power | See Fig. 1 and Tab. 4 | 4B | Little-endian |
mounted_sensors | See Tab. 5 | 1B | N/A |
active_sensors | See Tab. 6 | 1B | N/A |
acc_threshold | Acceleration threshold for wakeup tag from sleep | 2B | Little-endian |
IMU_FS_range | Inertial sensors full scale range. See Tab. 7 and Tab. 8 | 1B | N/A |
BARO_setting | 0 - disable; 1 - low power; 2 - normal mode; 3 - high precision | 1B | N/A |
AHRS_representation | 0 - disable; 1 - Tait-Bryan angles; 2 - quaternions | 1B | N/A |
bc_version | Current version of back-channel protocol | 1B | N/A |
bc_period | Back-channel period during normal operation [every Nth blink is BC]. 0 - disable. | 1B | N/A |
bc_period_sm | Back-channel period during sleep mode [every Nth blink is BC]. 0 - disable. | 1B | N/A |
crc | Place holder. Generated by DW1000 hardware | 2B | N/A |
Tab 1. Info message fields description.
Preamble length [B] | Preamble length field value |
|---|---|
4096 | 0 |
2048 | 1 |
1536 | 2 |
1024 | 3 |
512 | 4 |
256 | 5 |
128 | 6 |
64 | 7 |
Tab 2. Preamble length
Sleep mode | sleep mode field value |
Disable | 0 |
Sleep after 15 sec without motion | 1 |
Immediate sleep | 2 |
Tab. 3. Sleep mode
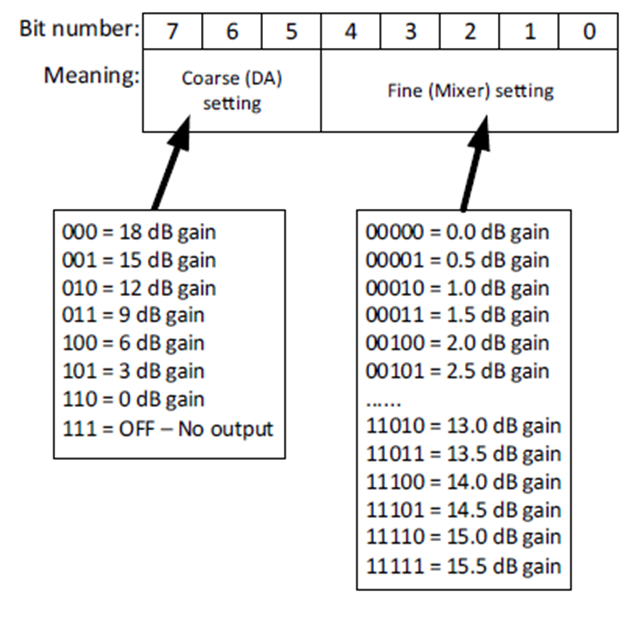
Fig. 1: Transmit power bytes [DW1000 datasheed]
DW 1000 TX power setting. | TX power field bites |
DEFAULT_PWR-TX_DATA_PWR | 31:24 |
BOOST_0.5ms_PWR-TX_PHR_PWR | 23:16 |
BOOST_0.25ms_PWR-TX_SHR_PWR | 15:8 |
BOOST_0.125ms_PWR | 7:0 |
Tab. 4: TX power setting fields. See DW1000 user manual.
Mounted and active sensor
The bit is set if the sensor is mounted/active.
bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
res. | res. | res. | res. | barometer | magnetometer | gyroscope | accelerometer |
Tab. 5: Mounted sensors
bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
AHRS_enable | res. | res. | res. | barometer | magnetometer | gyroscope | accelerometer |
Tab. 6: Active sensors
Gyroscope full scale range | IMU_FS_range field [7:4] |
± 250 dps | 0 |
± 500 dps | 1 |
± 1000 dps | 2 |
± 2000 dps | 3 |
Tab. 7: IMU_FS_range - gyroscope
Accelerometer full scale range | IMU_FS_range field [3:0] |
± 2 g | 0 |
± 4 g | 1 |
± 8 g | 2 |
± 16 g | 3 |
Tab. 8: IMU_FS_range – accelerometer
Structure of value part of TLV in C code:
typedef struct __attribute__((packed, aligned(1))){
uint8_t battVoltage; /**<Battery level in RAW form.*/
uint8_t platform; /**<Type of tag.*/
uint8_t hw_ver[2]; /**<Hardware version and revision.*/
uint8_t fw_ver[3]; /**<Firmware version, subversion and revision.*/
uint8_t channel; /**<Used UWB radio channel*/
uint8_t data_rate; /**<UWB radio data rate*/
uint8_t preamble; /**<UWB radio - preamble code length*/
uint8_t prf; /**<UWB radio - pulse repetition frequency*/
uint8_t preamCode; /**<UWB radio preamble code*/
uint8_t nSfd; /**<Start frame delimiter*/
uint8_t sleep_mode; /**<No motion sleep mode*/
uint8_t random_dev; /**<Random deviation of TDOA blink refreshrate*/
uint8_t refresh_interval[4]; /**<TDOA Blink refresh rate*/
uint8_t sm_refresh_interval[4]; /**<TDOA Blink refresh rate - no motion sleep mode*/
uint8_t TXpower[4]; /**<UWB radio transmitter power*/
uint8_t mounted_sensors; /**<Each bite represent one sensor, if set : concrete sensor is mounted on tag*/
uint8_t active_sensors; /**<Each bite represent one sensor, if set : concrete sensor is active*/
uint8_t acc_threshold[2]; /**<No motion - acceleration threshold*/
uint8_t IMU_FS_range; /**<Inertial measurement unit (accelerometer and gyroscope full scale ranges*/
uint8_t BARO_setting; /**<Barometer precision setting*/
uint8_t AHRS_representation; /**<Spatial rotation representation. 0 - disabled, 1 - Tait-brian angles, 2 - Quaternion */
uint8_t bc_version; /**<Current version of back-channel protocol. */
uint8_t bc_period_ri; /**<Back-channel period during normal operation [every Xth refresh interval] */
uint8_t bc_period_rism; /**<Back-channel period during sleep mode [every Xth refresh interval in sleep mode] */
} tag_info_msg_t;