Position Confidence Level
Position Confidence Level Radius is a metric that determines the quality of resulting position.
It is a distance in meters from calculated position to the farthest hyperbola that was used for calculation. This means that lower values directly translates to better position. However, it is important to note, that calculation with 3 anchors leads to CLR of value 0. This is because 3 anchors form optimum with zero error (there is no other redundant anchor that would enable the calculation engine to determine error in measurements).
CLR has reserved values above 9990, currently two are used:
- 9998 - calculation of position failed due to high error and only presence detection was possible. The coordinates in message (posX, posY) are coordinates of anchor that received the tag's blink with highest quality (therefore possibly nearest)
- 9999 - calculation of position was not possible (e.g. due to missing master, missing sync, not enough received blinks, etc.). Again, the coordinates are coordinates of anchor with best signal reception.
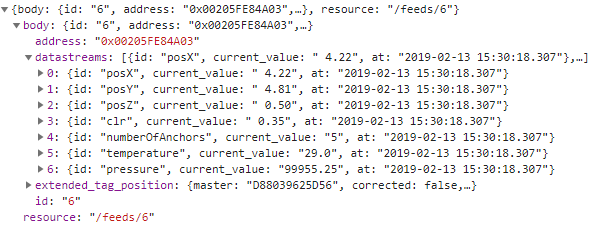
CLR is stored in database with each calculated position, is accessible in API (REST, websocket and also UDP connector) in datastreams array:
CLR can be visualized in Sensmap by toggling "CLR Visualization" in tab RTLS, menu Options.
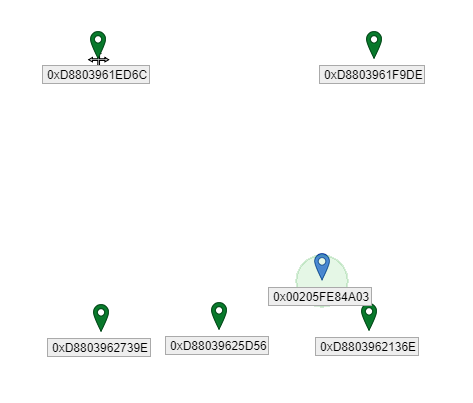
Fig1. CLR is visualized by green circle around tag
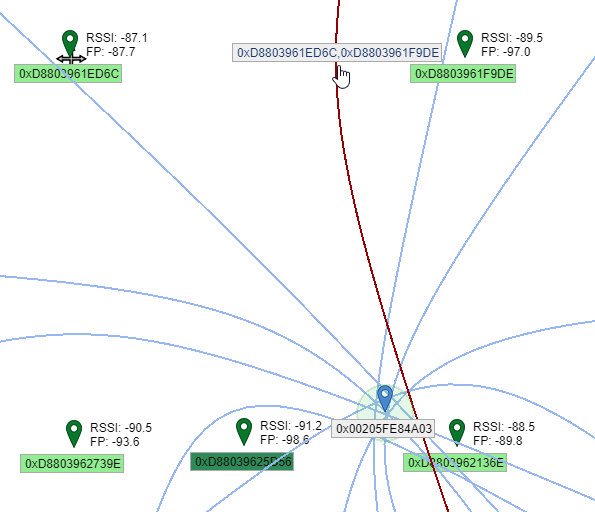
Fig2. Farthest hyperbola from calculated optimum was hyperbola formed
by anchors 0xD8803961ED6C and 0xD8803961F9DE. All other intersections
are inside the green circle.